O que são as redes de bordo presentes nos automóveis? Entenda o funcionamento dessas redes de comunicação e aprenda como realizar o diagnóstico correto
artigo por Diego Riquero Tournier fotos Arquivo Bosch
As redes de bordo automotivas têm se transformado no modelo dominante dentro dos principais fabricantes da indústria (montadoras e sistemistas), as quais passaram a adotar para todos seus projetos a lógica de desenvolvimento de arquiteturas eletrônicas veiculares baseadas em redes de bordo. Inclusive, esta predominância transcende ao mercado dos veículos da linha leve e, também, se consolida fortemente entre as aplicações da linha pesada e agrícola. Mas, o que seriam as redes de bordo?
Bom, as redes de bordo, como a própria palavra diz, são uma forma de interconexão dos circuitos eletrônicos (incluído centrais eletrônicas – ECU), facilitando a forma com a qual trafegam e se compartilham os dados.
Devemos entender este conceito de transmitir dados como o envio e retorno de informações codificadas, ou seja, por mais que a gente esteja vendo condutores elétricos (cabos e fios), o que estes cabos transmitem não é apenas eletricidade. O que verdadeiramente acontece dentro de uma rede de bordo é que de uma maneira a qual poderíamos defini-la como “quase que oculta”, se estabelece um formato de pulsos elétricos previamente modulados e colocados dentro de uma sequência lógica, para posteriormente serem encapsulados dentro de um pacote de dados, os quais seguem uma regra de um determinado protocolo de comunicação para enviar ou receber mensagens.
Para explicar um pouco melhor este conceito de protocolo de comunicação, podemos compará-lo a uma linguagem. Quem se lembra dos filmes antigos de guerra vai recordar o famoso código Morse, sistema mediante o qual se gerava uma sequência de pulsos elétricos produzidos de forma manual. Uma vez recebidos (do outro lado = receptor), esses pulsos eram decodificados e interpretados conforme o que este protocolo tinha definido como regra. Ou seja, de acordo com determinadas sequências lógicas e frequências de pulsos elétricos, eles passavam a ser transformados em letras e posteriormente essas letras colocadas em uma sequência que acabavam formando as palavras que definiam a mensagem.
Desta forma, por meio da utilização de pulsos elétricos, o ser humano já descobriu faz muitos anos que é possível criar protocolos de comunicação, passar mensagens e até criar algoritmos.
Claramente, com a chegada da tecnologia digital, todo este formato de comunicação se potencializou de maneira exponencial. Como não poderia de ser de outra forma, a indústria automotiva “pegou carona” para utilizar este conceito de arquitetura eletrônica de construção de malhas elétricas de dados, a qual permite simplificar a forma de construir chicotes elétricos, sem falar de todas as funcionalidades que não poderiam ser utilizadas dentro de uma arquitetura de chicotes elétricos convencionais (sem utilização de protocolos de comunicação).
A figura 1 mostra de maneira simbólica, a forma que se apresenta uma rede de bordo interconectada, constituindo uma malha de comunicação entre sistemas e centrais eletrônicas (ECU).
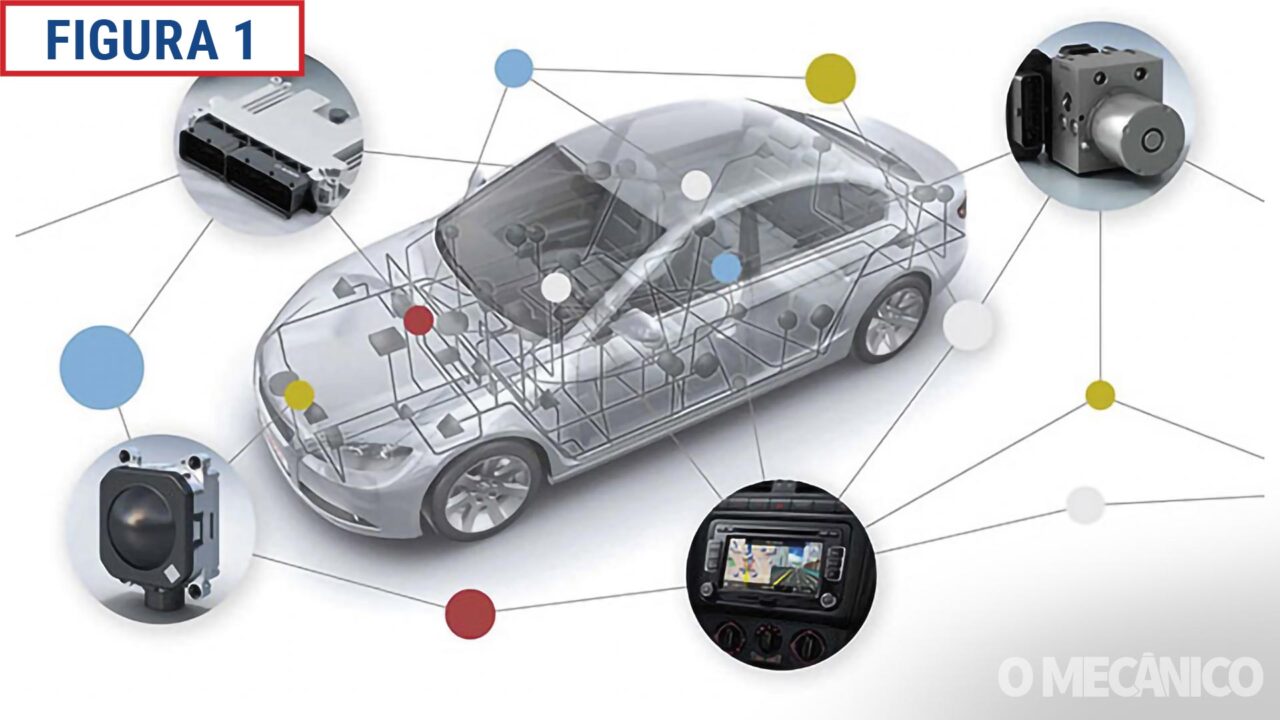
Devido a estas conexões múltiplas, muitos fabricantes chamam este tipo de arquitetura de “rede multiplexada”, e como mostra a figura acima, os dados desta rede transitam entre diferentes unidades de controle eletrônico. Mas, para garantir a prioridade dos dados (qual informação é mais importante para cada momento específico), todo sistema multiplexado contará sempre com uma ECU a qual terá a responsabilidade de atuar como uma unidade de eletrônica central. Inclusive, muitas vezes esta função pode ser compartilhada por uma ECU que já tem dentro da arquitetura eletrônica.
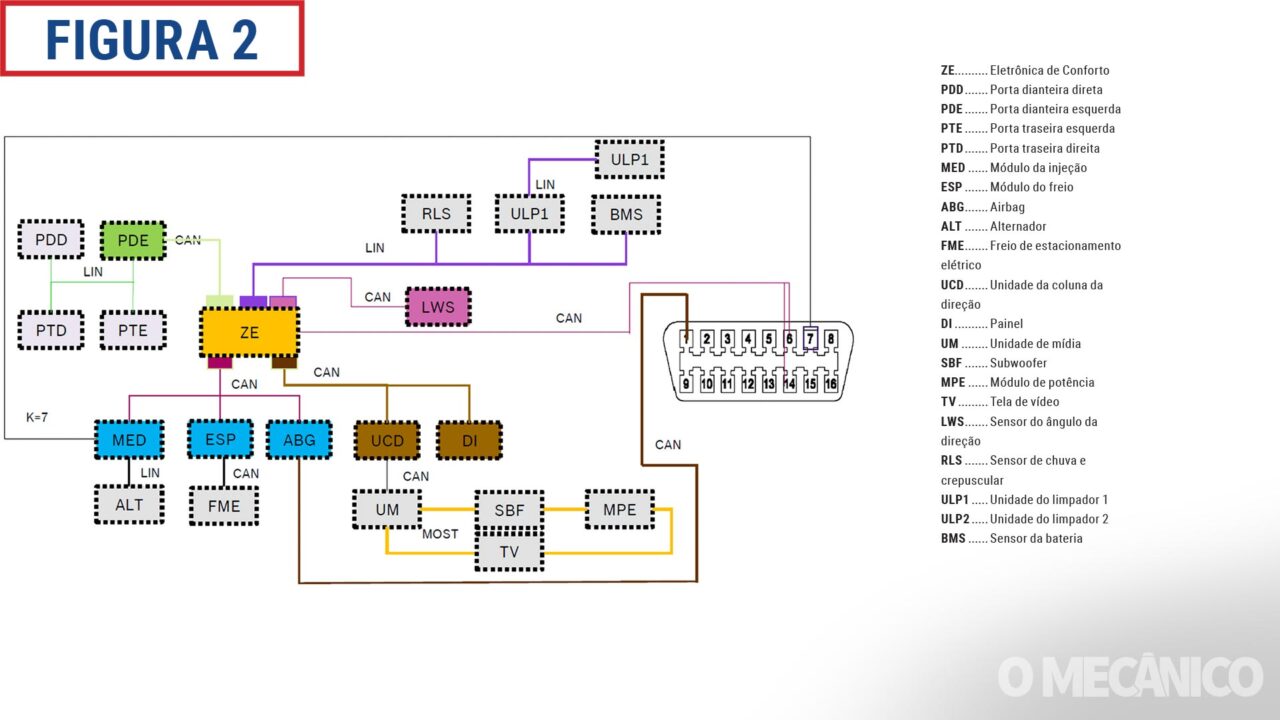
Outro papel funcional é representado na figura 2, no qual fica claro no esquema elétrico que todas as ECU presentes nesse sistema mantém uma conexão que as interliga com a unidade eletrônica de conforto (ZE), sendo ela quem acumulará a função de unidade de eletrônica central, além de executar suas funções como unidade para os sistemas de conforto.
Tecnicamente, essa unidade de eletrônica central pode aparecer também na literatura técnica com o nome de Gateway.
Como já falado, essa unidade tem a função de interligar todas as redes de dados presente no veículo, lembrando que pode e deve se conectar com todas as redes de dados diferentes presentes no mesmo veículo.
Estas diversidades de redes, por sua vez, utilizam protocolos de dados diferentes, ou seja, que poderíamos dizer que a unidade de eletrônica central ou Gateway, além de se comunicar com todas as outras ECU, deve atuar como uma espécie de “tradutor” de dados dos diferentes protocolos de comunicação presentes no veículo.
A figura 2 simboliza de forma clara a forma como está constituída uma rede de bordo de um veículo moderno e não precisa ser um veículo de alta gama e com muita tecnologia aplicada para ter esta tipologia de rede. Como falamos ao começo, esta forma de arquitetura eletrônica está presente nos veículos populares assim como no resto das categorias automotivas. Este tipo de aplicação somente cresce.
Mas falamos bastante de protocolos de comunicação e não explicamos muito bem o que isso significa, ou como essa lógica funciona. Vamos ver um exemplo para ampliar a ideia deste conceito.
Existem diversos protocolos de comunicação com sua arquitetura de rede própria e cada um desses protocolos define seus níveis de tensão operacional (tipo de pulso e sinais), os quais uma vez agrupados formam os pacotes de dados.
Por tanto, estes pacotes de dados com seus respectivos níveis de sinais somente passam a ter sentido dentro de um protocolo de comunicação específico.
Entre os principais protocolos utilizados pela indústria automotiva podemos destacar os sistemas CAN, LIN, MOST, FlexRay. Lembrando que existem diversos outros sistemas multiplexados e sem dúvidas, muitos outros serão desenvolvidos ainda.
Vamos tomar como exemplo o sistema de maior aplicação automotiva (Rede CAN BUS), para auxiliar-nos na lógica de interpretação um protocolo.
Na figura 3 se encontra representada a estrutura de um FRAME (mensagem consolidada dentro de um pacote de dados), e como vocês podem ver, essa mensagem consta de várias etapas (campos), sendo que cada uma dessas etapas consome unidades de informação (Bit), como qualquer outro dado informático.
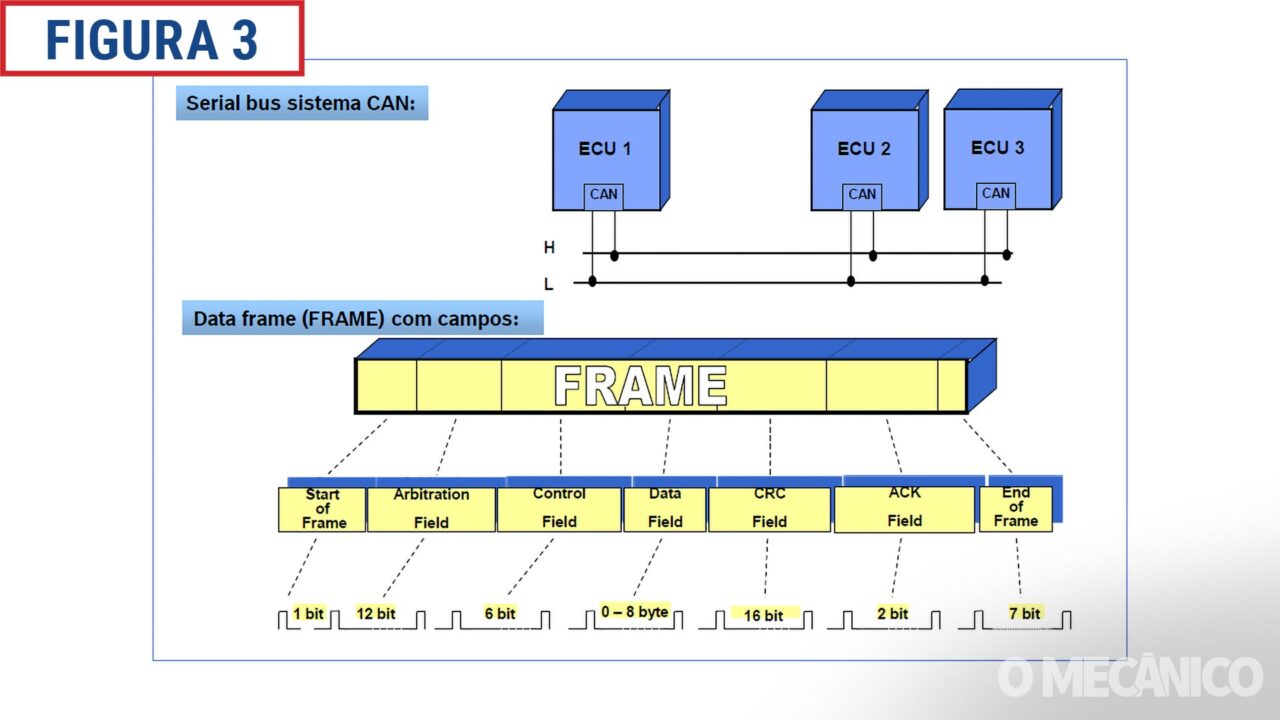
Para o caso do protocolo CAN BUS, o primeiro campo (Start of Frame), anuncia rapidamente que será iniciada uma transmissão de dados. A seguir, no campo (Arbitration), define-se qual é a prioridade das mensagens: um dado enviado pela unidade do ABS não é a mesma coisa do que, por exemplo, a temperatura do ar externo, principalmente falando em termos da criticidade e velocidade de variação desses dados.
O próximo passo corresponde ao Control, o qual representa a quantidade de dados contidos na mensagem. Na sequência, segue o Data, o qual agora sim representa o conteúdo propriamente dito da mensagem, e do que se trata essa informação (como exemplo uma data pode ser as RPM do motor, a temperatura do óleo, a velocidade da roda dianteira esquerda etc.). Lembrando que a quantidade de bits no campo Data pode variar conforme o tipo de informação.
No campo CRC, se identificam possíveis erros na mensagem, e no campo ACK, se notifica ao emissor que a mensagem foi entregue de forma integra, sendo possível deduzir com base neste campo as comunicações que se realizam em uma rede, funcionam de forma bidirecional.
Para finalizar o pacote de dados FRAME, se fecha o processo com o campo End of Frame, deixando desta forma, a ECU apta para processar uma nova mensagem.
Na parte superior da figura 3, é possível ver a forma de conexão das unidades de controle (ECU), através de 2 fios os quais na prática vamos encontrá-los no veículo em um formato trançado (para minimizar as interferências eletromagnéticas).
A forma de comunicação entre as unidades (barramento) acaba estabelecendo um caminho ou uma rota. Devemos imaginar como se fosse um ônibus que segue uma rota com diferentes pontos pré-estabelecidos nos quais sobem e descem pessoas. Para o caso da nossa analogia, sobem e descem dados desse “ônibus”, por este motivo, este tipo de arquitetura carrega o “sobrenome” de BUS.
A rede CAN BUS, replica a informação em 2 níveis de tensão (High = Alto e Low = Baixo), estes níveis de tensão assim como, os formatos de sinais, são os pontos que vamos analisar desde a perspectiva do diagnóstico.
Trabalhando com Redes de Bordo
Para trabalhar no diagnóstico e analisar o correto funcionamento das redes de bordo, devemos levar em consideração tudo o que foi comentado anteriormente com relação à grande diversidade de sistemas presentes no mercado. Neste sentido, o ponto mais importante a ser considerado pelos técnicos automotivos, é a disponibilidade de informação técnica.
E quando falamos de informação técnica, especificamente o mais importante a levar em consideração é a disponibilidade de dados técnicos e esquemas elétricos dos diferentes tipos de redes presentes no veículo, assim como a localização das unidades de controle e o tipo de resistência utilizada no barramento de cada rede.
Inclusive, considerando a informação das resistências que atuam como elemento final de barramento na maioria das tipologias de rede, muitos sistemas, contam com duas resistências de final de barramento de 120 ohms (solução muito aplicada em sistemas CAN-BUS),
resistências as quais a nível de diagnóstico são de grande importância para medir a condição de integridade física da rede. Considerando o valor que deve ser encontrado, produto da associação de resistências em circuitos elétricos conforme a lei de Ohm, é possível realizar uma analise como o apresentado na figura abaixo.
A figura 4 mostra como entre as linhas CAN H e CAN L de um mesmo barramento de uma rede CAN HS (Rede CAN de Alta Velocidade – High Speed), deve existir uma resistência aproximada aos 60 ohms. Desta forma, é possível garantir que o circuito está com os elementos finais (resistências) dentro dos valores especificados e, portanto, o circuito está em boas condições operacionais.
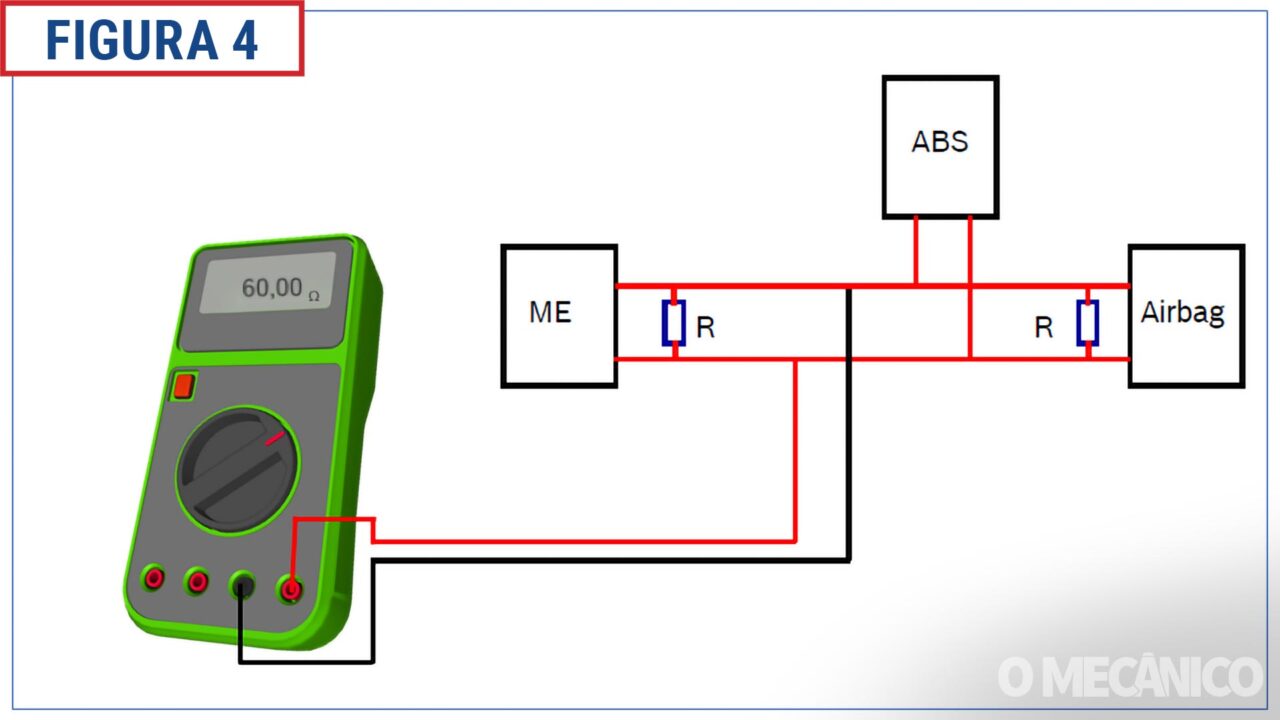
Caso o circuito conte com um final de linha em aberto, o valor do circuito da rede já não será mais de 60 ohms, devido a que o mesmo passará a assumir o valor individual de uma das linhas (com sua respectiva resistência). Por sua vez, esta resistência já não divide mais os valores por associação de resistências dentro do circuito e passará a mostrar na medição o valor de 120 ohms. Segundo o caso que assumimos como exemplo, esta lógica não poderá ser replicada para qualquer sistema de rede, principalmente sem o conhecimento do funcionamento e especificações do sistema.
Bom, agora que já vimos que é possível medir a resistência da rede, assim como que, para todas aquelas redes que utilizam 2 fios, é possível identificá-los visualmente porque se encontram em formato trançado. Veremos como são feitas as medições dos sinais de uma rede de bordo.
Para isso, será necessária a utilização de um osciloscópio, porque o que vimos ao começo das frequências de pulsos transformados em linguagem (protocolos) é exatamente o que vamos medir e analisar a nível do diagnóstico.
A partir das medições de sinais, não será possível saber nada com relação à mensagem ou conteúdo de um pacote de dados, mas, sim, será possível identificar se o padrão de sinal elétrico corresponde ao tipo de rede que está sendo analisada. Assim como, identificar se os padrões de sinais (que são um reflexo indireto das mensagens) estão trafegando de forma integra dentro da rede, sem alterações que identifiquem as caraterísticas de uma falha.
E falamos que será necessário utilizar um osciloscópio. Esta condição responde a uma necessidade técnica relacionada com a velocidade com a qual acontecem os eventos dentro de uma rede de bordo, já que estes eventos são extremamente rápidos em termos de tempo, portanto, este tipo de medição não pode ser feita com um multímetro devido ao baixo nível de resolução que impossibilita a interpretação dos sinais de este tipo de sistema.
Na próxima edição, analisaremos os sinais de uma rede CAN BUS HS (alta velocidade), uma rede CAN LS (baixa velocidade) e uma rede LIN.
The post Coluna Mecânico Pro: Diagnóstico de Redes de Bordo (Parte 1) appeared first on Revista O Mecânico.
Coluna Mecânico Pro: Diagnóstico de Redes de Bordo (Parte 1) Publicado primeiro em http://omecanico.com.br/feed/
Nenhum comentário:
Postar um comentário